两轴云台是一种用于相机或其他设备的稳定平台,可以使设备在运动或震动的情况下保持稳定,从而获得更加清晰、平稳的拍摄效果。本篇文章将重点介绍设计两轴云台的机械结构。
设计要点 1. 机械结构两轴云台主要由底座、旋转轴、云台支架、电机等部件组成。底座应该足够稳定,以确保云台能够在不失稳的情况下旋转。旋转轴应该设计得足够牢固,并能够承受相机或其他设备的重量。云台支架应该能够旋转并固定在旋转轴上。电机应该能够提供足够的扭矩和控制能力。
2. 控制系统控制系统是两轴云台的核心部分,其负责控制云台的旋转和稳定性。控制系统应该包括足够的传感器,如陀螺仪、加速度计等,以便实时监测云台的姿态和运动状态。此外,控制系统应该包括一些算法,如PID控制算法,以控制电机的旋转速度和方向。
3. 电源系统电源系统负责为云台提供足够的电能。由于两轴云台的电机需要较大的电流才能运转,因此电源系统需要足够的容量和功率。此外,电源系统应该设计得足够稳定,以避免电压波动对云台的影响。
设计流程 1. 确定需求在设计两轴云台之前,我们需要明确其使用场景和目的。我们需要考虑以下问题:
云台需要支持的设备重量是多少? 云台需要支持的运动范围是多少? 云台需要的稳定性和精度是多少? 云台需要的电源和控制系统是什么? 2. 选择零部件根据需求,我们可以选择适合的机械、电子和电源部件。例如,我们可以选择适合的电机、轴承、传感器和电池。
3. 设计机械结构我们需要设计云台的机械结构。这包括设计底座、旋转轴、云台支架等部件,并确定它们之间的连接方式和尺寸。在设计机械结构时,需要考虑到以下因素:
设备的重量和尺寸。 云台的稳定性和承重能力。 云台的运动范围和限制。 4. 设计控制系统我们需要设计云台的控制系统。这包括选择合适的传感器和控制器,编写控制算法,以及设计控制电路。在设计控制系统时,需要考虑到以下因素:
传感器的精度和灵敏度。 控制算法的稳定性和精度。 控制器的功率和控制能力。 控制电路的稳定性和安全性。 5. 安装和调试在完成设计后,我们需要将零部件组装起来,并进行调试和测试。这包括安装电机、传感器和控制器,连接电源和控制电路,调试控制算法,以及测试云台的稳定性和精度。
结论两轴云台是一种非常有用的设备,可以提高相机或其他设备的拍摄质量和稳定性。在设计两轴云台时,我们需要考虑到机械结构、控制系统和电源系统等方面,以确保云台能够满足使用需求。同时,我们需要选择适合的零部件,并进行安装和调试,以确保云台的稳定性和精度。
云台设计 功能性在空间坐标系中,对于云台来说有三个旋转的自由度,分别绕三个轴旋转
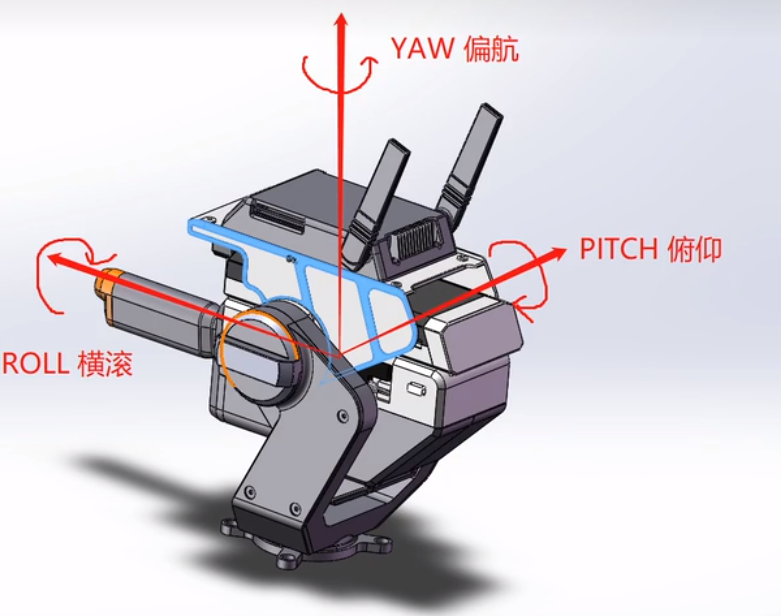
将之类比为人的脑袋之后,即偏航为左右摇头,俯仰为上下点头,横滚为左右偏头
使用YAW偏航轴和PITCH俯仰轴可覆盖一个球面视角,因此二轴云台使用俯仰轴和航向轴即可。但不能保证视角都是水平的,因此三轴云台才需要横滚轴来保证视角为水平
合理性 重心(静态) 重心决定了空载的姿态; 重心决定了静态的负载; 理想状态下,重心在轴上 当重心不在yaw轴上时,力臂会受到一个弯矩,影响寿命等 转动惯量(动态) 转动惯量决定动态负载大小 决定启停的响应 控制收敛的速度对于旋转负载:
功率=转矩x角速度 转矩=转动惯量x角加速度 刚度云台是一个需要刚度很大的系统。是需要快启快停,因此刚度要求高
结构刚度与材料刚度 制造过程保证刚度 装配过程保证刚度 快速灵敏的机构必须要保证刚度 尽量选择电机直驱的传动方式刚度强度的区别:
刚度:不变形
强度:不断裂
比如撑杆跳运动的杆,则需要强度高,刚度低,才能保证在弯曲的时候不会断裂且能足够弯曲
电机选型 选型的标准,是看性能目标 根据结构,预算选型 或者设计 功率:额定功率(是否能满足工作状态) 转矩:最大转矩(能否带动负载) 转速:额定转速(能否满足参数要求)(经验的主要决定参数) 转动惯量:与负载匹配(决定了电机响应时间)对于云台来说:
转矩与惯量是最关键的 功率和转速后考虑 计算案例计算方法基于以下公式:
功率 = 转矩 x 角速度 转矩 = 转动惯量 x 角加速度 转动惯量是由结构决定的,角加速度是设定的转动惯量可在测量/评估中得到,需制定材料密度,获取重量信息等。我的方法是通过UG指定材料密度后可以直接通过测量体命令得到
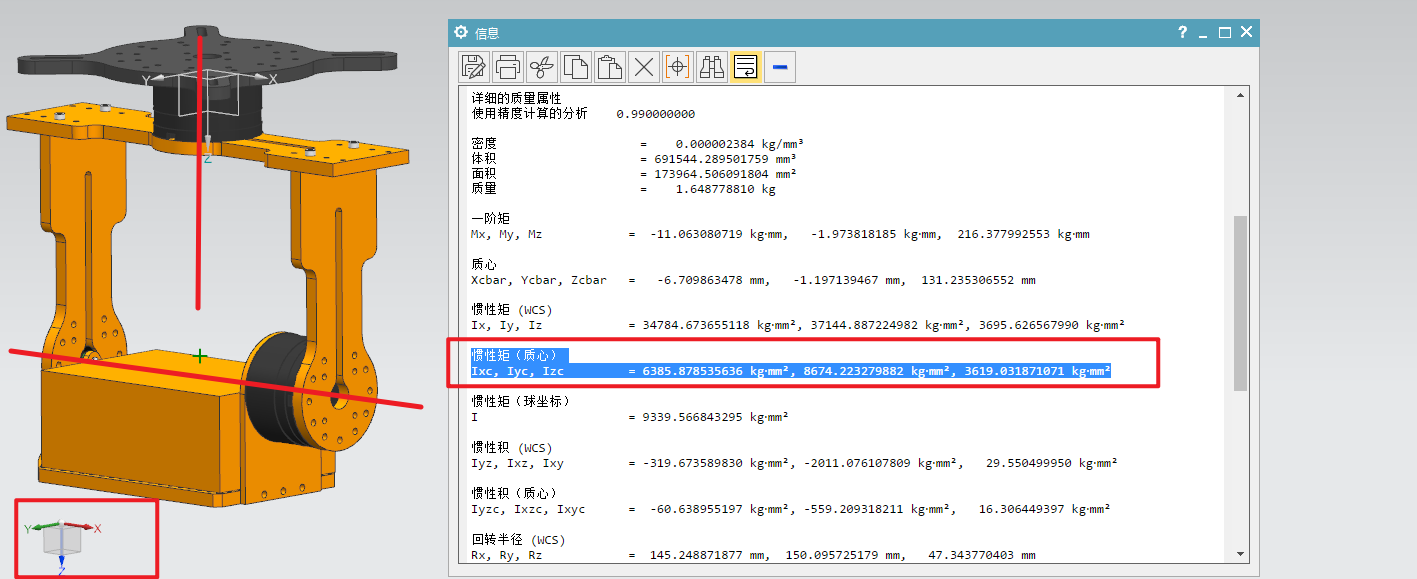
计算Z轴:
单位换算3619.031871071 kg⋅mm² = 0.0036190318710700 KG⋅m²
设定 角加速度 设加速时间为0.5s转动180°,则1s转动360°,设加速运动为均速加速,则角速度为2π/(rad/s),角加速度为2π/0.5 (rad/s²)
角度(°)= 弧度(rad)× 180°/π
转矩 = 转动惯量 x 角加速度 功率 = 转矩 x 角速度 转矩 = 0.00361903 (KG⋅m²) x 2π/0.5 (rad/s²) = 0.45 N⋅m 功率=转矩 x 2π(rad/s) = 2.826 W因此需要选一个功率在3W左右,且扭矩大于0.45N⋅m的云台电机
结构构成 执行器 摄像头 激光测距模块 结构构件 相机支架 Y型支架 云台支架 PITCH轴限位 YAW轴限位 驱动部件 PITCH轴电机 YAW轴电机