目 录 摘 要 I ABSTRACT Ⅱ 1 绪 论 1 1.1 课题设计背景和题目要求 1 1.2 自动清扫机器人的研究现状 2 1.3 研究的目的和意义 8 1.4 设计的重点和难点 8 2 自动清扫机器人的方案设计 9 2.1 自动清扫机器人的总体方案 9 2.2 自动清扫机器人的关键技术 11 2.3 自动清扫机器人各部分方案设计…12 3 自动清扫机器人的结构设计 17 3.1 直流电机选择 17 3.2 蜗轮蜗杆的选择 17 3.3 清扫机构电机的选择…19 3.4 自动清扫机器人电池的选用…19 3.5 清扫机构中蜗杆上轴承强度校核…20 3.6 清扫机构中涡轮轴的校核…22 3.7 带传动设计…23 3.8 清扫轴的基本参数计算…25 4 自动清扫机器人控制部分介绍…27 4.2 自动清扫机器人的硬件设计…27 4.2 自动清扫机器人的软件设计…27 5 结 论 29 参 考 文 献 30 致 谢 42 1.3 研究的目的和意义 清扫机器人将移动机器人技术与清扫技术相结合,实现室内环境(地面)的半自动或全自动清洁,而不是传统的大型手动清洁。近年来,国内外学者纷纷引起人们的关注。作为智能移动机器人的特殊应用,智能吸尘器更加具体地反映了移动机器人的一些关键技术,并具有很强的代表性。从市场角度来看,吸尘器将大大降低劳动强度,提高劳动效率,适用于室内和公共场所的室内清洁。因此,自主智能吸尘器的发展具有挑战性和前景。 随着现代传感器与机器人技术领域的关键技术的融合,本项目的目标是开发一种廉价、全覆盖的智能家居清洁机器人,完全满足国内需求,方便实用。它可以取代传统的家居清洁方法,使家居生活更加电气化,智能化,更好地为人类服务。 1.4 设计的重点和难点 清洁机构,行走机构,集尘机构和垃圾收集机构的设计和布局是设计的重点。机器人清洁机构的关键部件的设计也是一个困难的设计点。由于机器人具有避障功能,其外形设计也应该认真对待。如何处理垃圾处理,如何处理除尘设备也是本设计中的一个重要问题。
2.自动清扫机器人的方案设计 2.1 机器人的总体方案 我的设计旨在研发一种结构简单、控制灵活、路径规划、操作简单、自主行走、自动避障、便于实现等一系列任务的清扫机器人。清扫机器人总体由控制系统与机械部分组成。机械部件由高强度塑料底盘、两个驱动轮、壳体和从动件组成。是清扫电机、除尘电机、电池、垃圾收集处理机构设计、清洁刷和控制系统的载体。机器人总体图如图2-1所示。
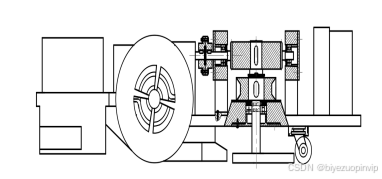
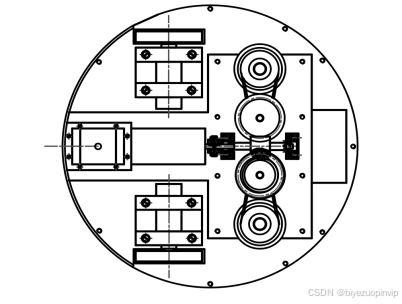
图2-1 机器人总体图













