最近,Mask的22自由度灵巧手小秀了一把操作,全世界在做类人手上也是一直热度不减,本文主要就灵巧手概述、主流供应商、分类、基本原理、基本选型参数对灵巧手进行了初步介绍。同时,文末附了几段顶尖灵巧手的实录视频供大家阅读。
 01 灵巧手概述
01 灵巧手概述灵巧手(Dexterous Hand)是现代人工智能与机器人技术中的重要组成部分。发展历程大致如下:其发展经历了从早期机械抓取设备到具备灵活感知与精确操控能力的高阶智能机械手的转变。
20世纪60年代,初代灵巧手以实现简单的抓取和搬运为目标;进入21世纪,随着传感器技术、材料科学和深度学习算法的进步,灵巧手逐步具备了精确抓取、复杂操作和实时反馈的能力。目前,灵巧手的研究和应用成为服务机器人、工业自动化以及医疗辅助等领域的重要前沿。
02 灵巧手的主流供应商
欧美供应商
Shadow Robot Company(英国)特点:领先的五指仿生手技术,具有高自由度和精确性。应用:研究、医疗、工业操作。代表产品:Shadow Dexterous Hand。Schunk(德国)特点:工业抓取与自动化专家,耐用性强,适用于高强度作业。应用:自动化生产线、精密操作。代表产品:SVH仿生手。Barrett Technology(美国)特点:模块化设计,灵活抓取能力。应用:研究、教育与工业机器人领域。代表产品:BarrettHand。qbrobotics(意大利)特点:柔性灵巧手,仿生设计。应用:轻工业、医疗康复和教育。Festo(德国)特点:气动控制技术,仿生灵巧手具有创新的轻量化设计。应用:自动化与教学。日本供应商Denso Robotics特点:高效工业抓取与自动化系统。应用:制造业自动化。Mitsubishi Electric特点:高精度抓取与协作功能。应用:电子装配、实验室操作。Kawasaki Robotics特点:重工业领域的高强度灵巧手,结合强大的力反馈技术。应用:汽车制造、重型工业。Shadow Robot Japan特点:与主公司保持一致的技术,专注于亚洲市场。应用:学术研究和机器人开发。中国供应商海智机器人(HiBot)特点:专注工业自动化,高性价比,适合智能制造。应用:汽车装配、电子产品生产。佳驰机器人(Jaka Robotics)特点:轻量化设计,专注服务型机器人领域。应用:零售、餐饮、医疗康复。因时机器人(Inspire Robots)特点:医疗领域仿生手,结合智能传感器和人工智能。应用:康复治疗、手术辅助。灵动科技(Agile Robots)特点:工业与医疗自动化的跨领域技术。应用:电子产品生产、医疗辅助。优必选科技(UBTECH Robotics)特点:灵活、智能,适合教育和服务机器人。应用:教育、娱乐机器人市场。新松机器人(SIASUN Robotics)特点:稳定性高,面向高精度工业应用。应用:汽车生产、机械装配。 03 灵巧手分类根据传动原理的不同,灵巧手主要可以分为以下几类:
1. 电动传动型工作原理利用伺服电机或步进电机作为驱动源,通过齿轮、连杆或丝杠等传动机构实现手指关节的运动。特点控制精度高,运动可重复性强。响应速度快,适合高精度任务。易于与现有电控系统集成。代表产品Shadow Dexterous Hand、Schunk SVH、3-Finger Adaptive Gripper
 Shadow Dexterous Hand
Shadow Dexterous Hand Schunk SVH 3-Finger Adaptive Gripper2. 液压传动型工作原理使用液体(如油)作为工作介质,通过液压泵、液压缸等装置驱动关节运动。特点
Schunk SVH 3-Finger Adaptive Gripper2. 液压传动型工作原理使用液体(如油)作为工作介质,通过液压泵、液压缸等装置驱动关节运动。特点提供强大的输出力,适合重载任务。
结构稳定,能在高负载条件下工作。
代表产品
Sarcos Guardian、Boston Dynamics
 Sarcos Guardian
Sarcos Guardian Boston Dynamics3. 气动传动型工作原理通过压缩空气驱动气缸动作,从而带动关节和手指运动。优点结构简单,重量轻。成本低,适合大批量工业应用。适应恶劣环境,耐用性较强。缺点控制精度相对较低。压缩空气供应稳定性会影响性能。代表产品
Boston Dynamics3. 气动传动型工作原理通过压缩空气驱动气缸动作,从而带动关节和手指运动。优点结构简单,重量轻。成本低,适合大批量工业应用。适应恶劣环境,耐用性较强。缺点控制精度相对较低。压缩空气供应稳定性会影响性能。代表产品Festo BionicSoftHand
 Festo BionicSoftHand
Festo BionicSoftHand4. 形状记忆合金(SMA)传动型
工作原理利用形状记忆合金的材料特性,通过温度变化使合金变形,从而实现手指运动。优点结构紧凑,重量轻。高度仿生,适用于小型灵巧手设计。缺点响应速度慢,控制复杂。功耗高,材料寿命受限。代表产品
Soft Robotics变刚度柔性手
 Soft Robotics变刚度柔性手04 灵巧手的基本原理
Soft Robotics变刚度柔性手04 灵巧手的基本原理目前,市面上应用最为广泛的为电动灵巧手。电动灵巧手的主要传动结构分别有以下几类:
腱绳传动利用钢丝绳的张力实现运动的传递,常用于小型和轻量化设计。优点:轻便、灵活。缺点:需保持张紧,易磨损。 连杆传动由连杆、转轴等组成,利用杠杆原理实现力和运动的传递。优点:结构简单,成本低。缺点:行程受限,灵活性较差。
连杆传动由连杆、转轴等组成,利用杠杆原理实现力和运动的传递。优点:结构简单,成本低。缺点:行程受限,灵活性较差。 齿轮传动齿轮传动通过齿轮啮合实现运动的传递,具有高精度和高效率的优点。优点:刚性强,适合高载荷。缺点:结构复杂,可能需要精密制造和装配。
齿轮传动齿轮传动通过齿轮啮合实现运动的传递,具有高精度和高效率的优点。优点:刚性强,适合高载荷。缺点:结构复杂,可能需要精密制造和装配。 丝杠传动
丝杠传动通过丝杠与螺母的相对运动,将旋转运动转化为直线运动。优点:精度高,运动平稳。缺点:传动速度较慢,适合需要高精度的位置控制场景。

补充:传感反馈
除了上述传动结构件之外,部分灵巧手还配套传感器,具体如下:
触觉传感器:感知表面摩擦力和压力。
力传感器:监控抓取力度,防止物体损坏。
视觉传感器:与手眼协作,实现复杂场景的动态识别和操作。
特斯拉灵巧手基本原理介绍
蹭一波老马同学的热度吧,不过特斯拉的灵巧手还是很值得大家进行深入研究。
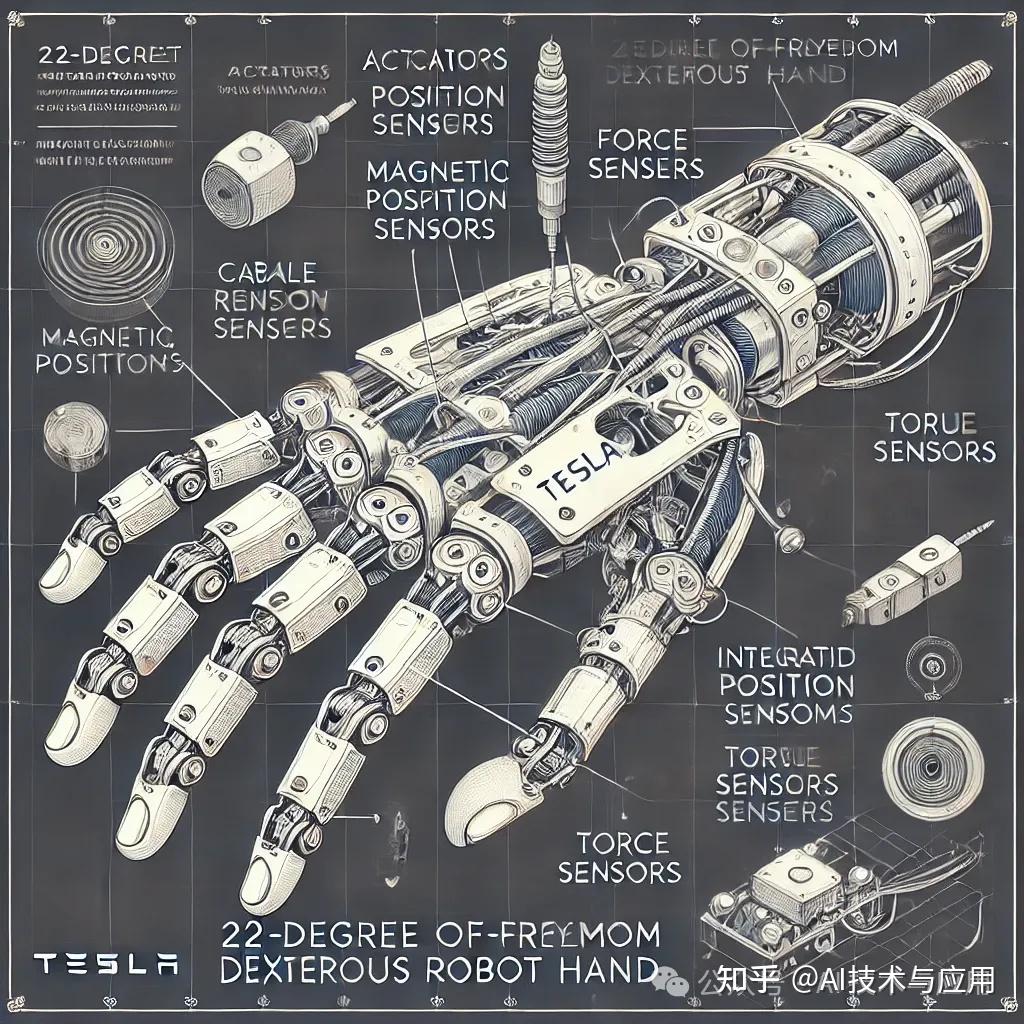
(暂未找到专利情况)AI生成的网图,读者自行脑补。
1. 机械设计原理
高自由度设计Tesla 灵巧手具备 22 个自由度,其中包括手指、手掌和腕部的灵活运动。这种设计旨在模拟人类手部27个自由度,能够执行复杂抓取、精密操作和动态调整。手指部分:每根手指有多个关节,允许弯曲、伸展和侧向移动。手掌部分:增加独立运动模块,可调整抓取时的姿态和力分布。模块化执行器布局特斯拉将大部分执行器整合到手臂或前臂中,通过柔性电缆传动减少手部的体积和重量,同时优化了外形和功能。2. 传动与力学原理电缆驱动系统Tesla 的灵巧手采用了电缆驱动来操作手指关节:原理:电机驱动电缆拉动或松弛,产生关节的弯曲或伸展动作。电缆路径经过优化以提高传递效率并减少能量损耗。优点:相比传统独立执行器设计,电缆驱动减少了执行器的数量,使手部更轻便、灵活。弹簧与阻尼结构在手指关节中加入了扭力弹簧,确保关节运动的稳定性和复位能力,同时减少对电机的负载。高效力学耦合在保持运动自由度的同时,通过机械耦合降低了控制的复杂性。例如,多个关节可以通过单一驱动器实现同步运动。3. 控制与传感策略传感器网络灵巧手配备了以下传感器用于精确控制:磁性位置传感器:追踪每个关节的角度,确保动作精确执行。触觉传感器:分布于指尖和手掌,用于检测压力和接触位置,提升抓取的灵敏性。力传感器:用于实时监测施加的抓取力,确保安全操作。控制算法使用特斯拉的神经网络架构,通过深度学习与实时传感数据结合:动态抓取:基于物体形状、重量和材质调整抓取动作。柔性控制:适应复杂的任务需求,例如抓取不同尺寸和形状的物体。仿生灵巧性模仿人类手部的协调动作,例如分步抓取、微调力道等,使得机器人可以执行高精度任务。 05 灵巧手的基本选型参数选型主要选型参数自由度(Degrees of Freedom, DoF)灵巧手自由度越高,灵活性越强,但相应控制难度和成本也增加。承载能力根据应用场景选择不同负载能力的灵巧手。例如,工业场景需要高承载能力,而医疗应用则强调精细操作。材质与耐用性考虑材质强度、耐腐蚀性以及环境适应能力。传感能力是否配备高精度触觉、力觉和视觉传感器。控制接口接口类型需与现有控制系统兼容,例如ROS(机器人操作系统)。06 总结
灵巧手技术正逐步从实验室走向现实应用场景,其未来发展方向包括进一步提升仿生能力、降低成本以及扩展适用范围。随着特斯拉等科技巨头的参与,这一领域或将迎来更大突破,推动智能机器人技术进入新的纪元。
特斯拉在灵巧手领域的突破为机器人技术注入了新活力。其最新发布的Optimus项目融合了先进的AI控制系统和仿生设计。特斯拉灵巧手在细节操作和实时响应方面展现了显著进步,特别是在实现低功耗运行和高度灵活性的平衡上令人瞩目。